Подключение биполярного шагового двигателя
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом.












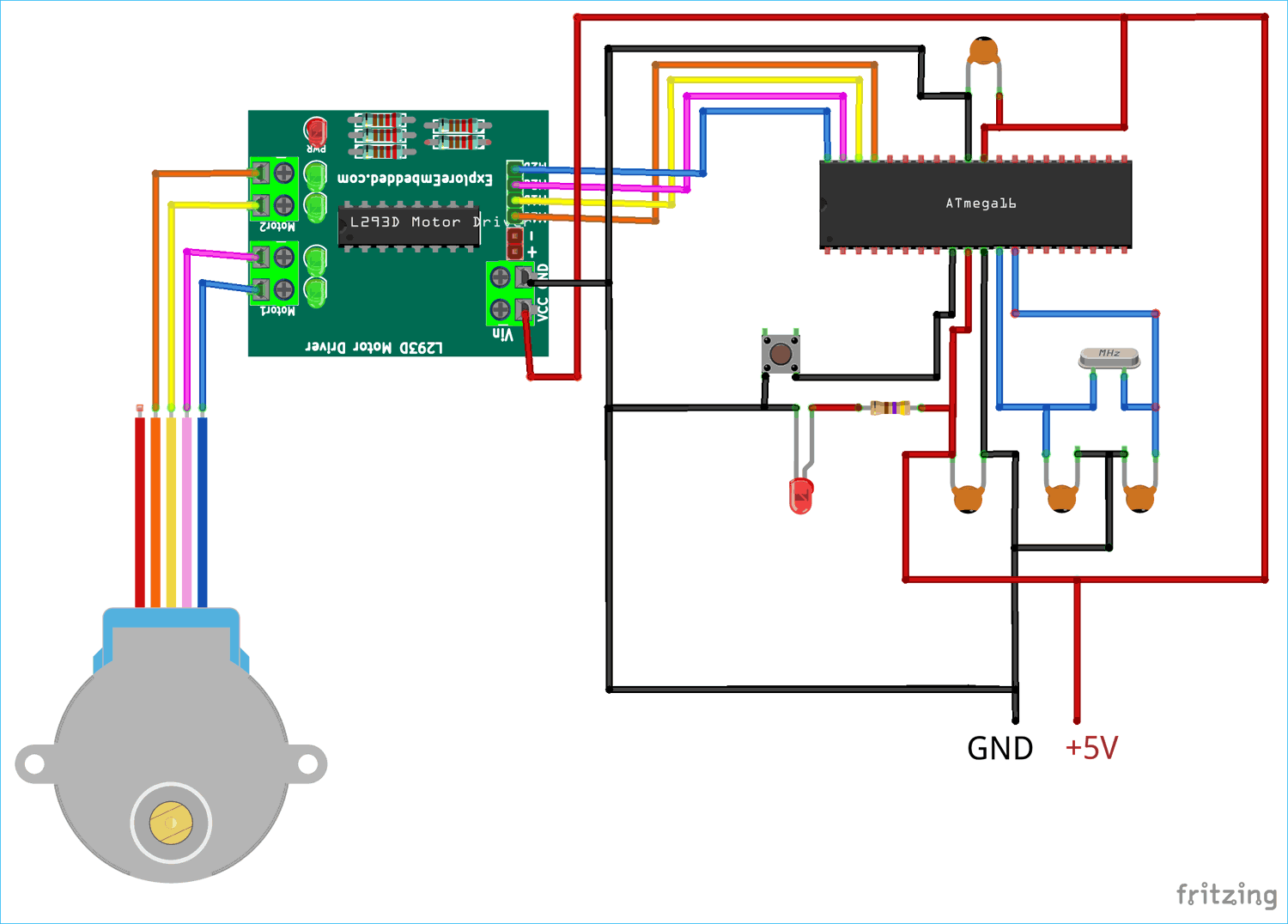
Подключение шагового двигателя. Контроллер L Серия-статей: Программирование Arduino с нуля 8 Серия-статей: Ардуино, использование шаговых двигателей 1 Мы подключили к нашему контроллеру обычные двигетели постоянного тока. С их помощью можно, например двигать мобильную платформу на колесном или гусеничном ходу или совершать простейшие действия типа открытия двери или поднятия штор.

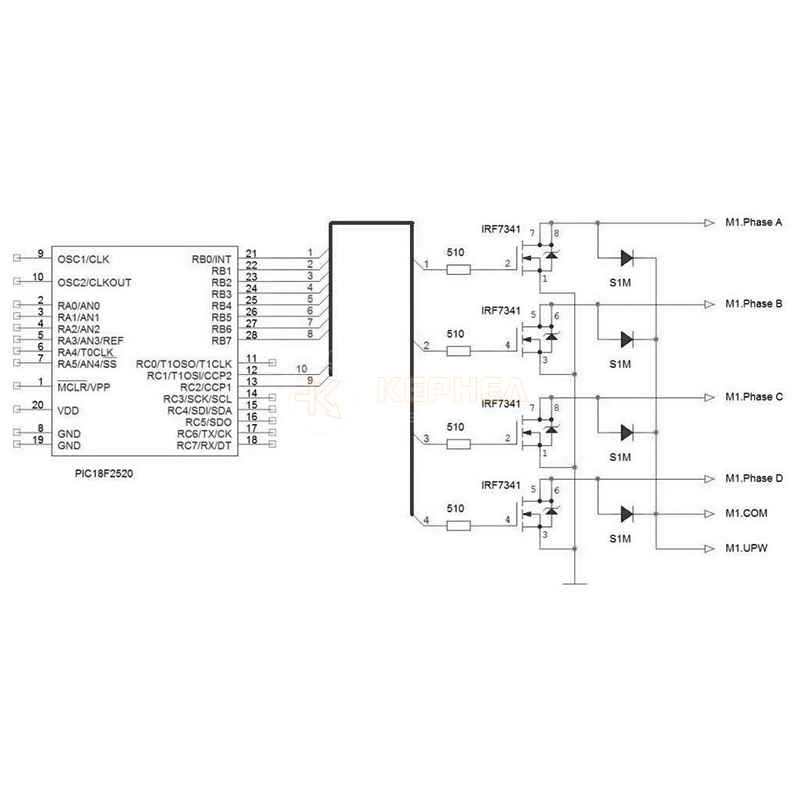
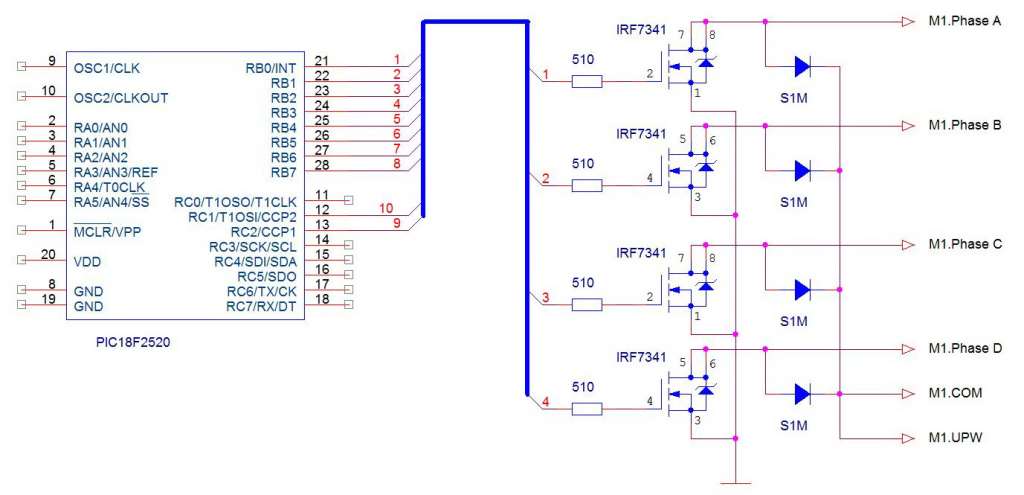

Биполярный шаговый двигатель используется в роботизированных механизмах, таких как 3D-принтеры, станки с ЧПУ, игрушки и так далее. Особенностью шагового двигателя является дискретное вращение. То есть, при подаче на обмотку двигателя импульса совершается небольшой поворот ротора. Шаговый двигатель износостойкий, потому что не имеет в своей конструкции щёток, которые соприкасаются с ротором. Биполярный двигатель имеет по одной обмотке для каждой фазы движения магнитного ротора.